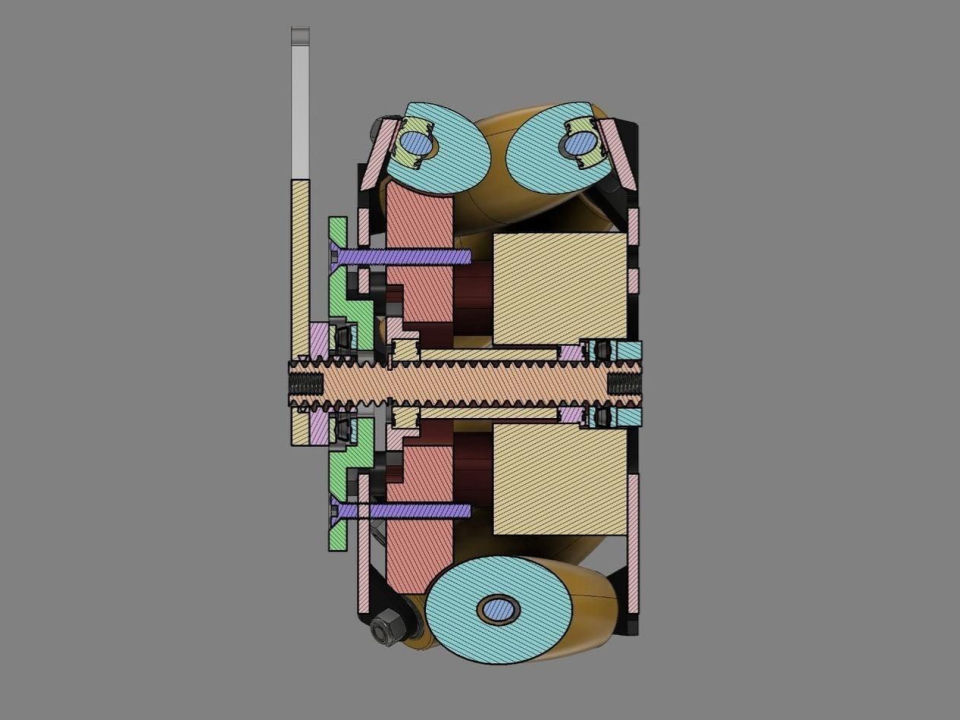
102b ttrpg robot
a comically fast robot that lets you play a variety of board games with that one friend who lives across the country. differential cable-driven kinematics keeps the moving mass down and keeps the motion system minimally physically invasive.
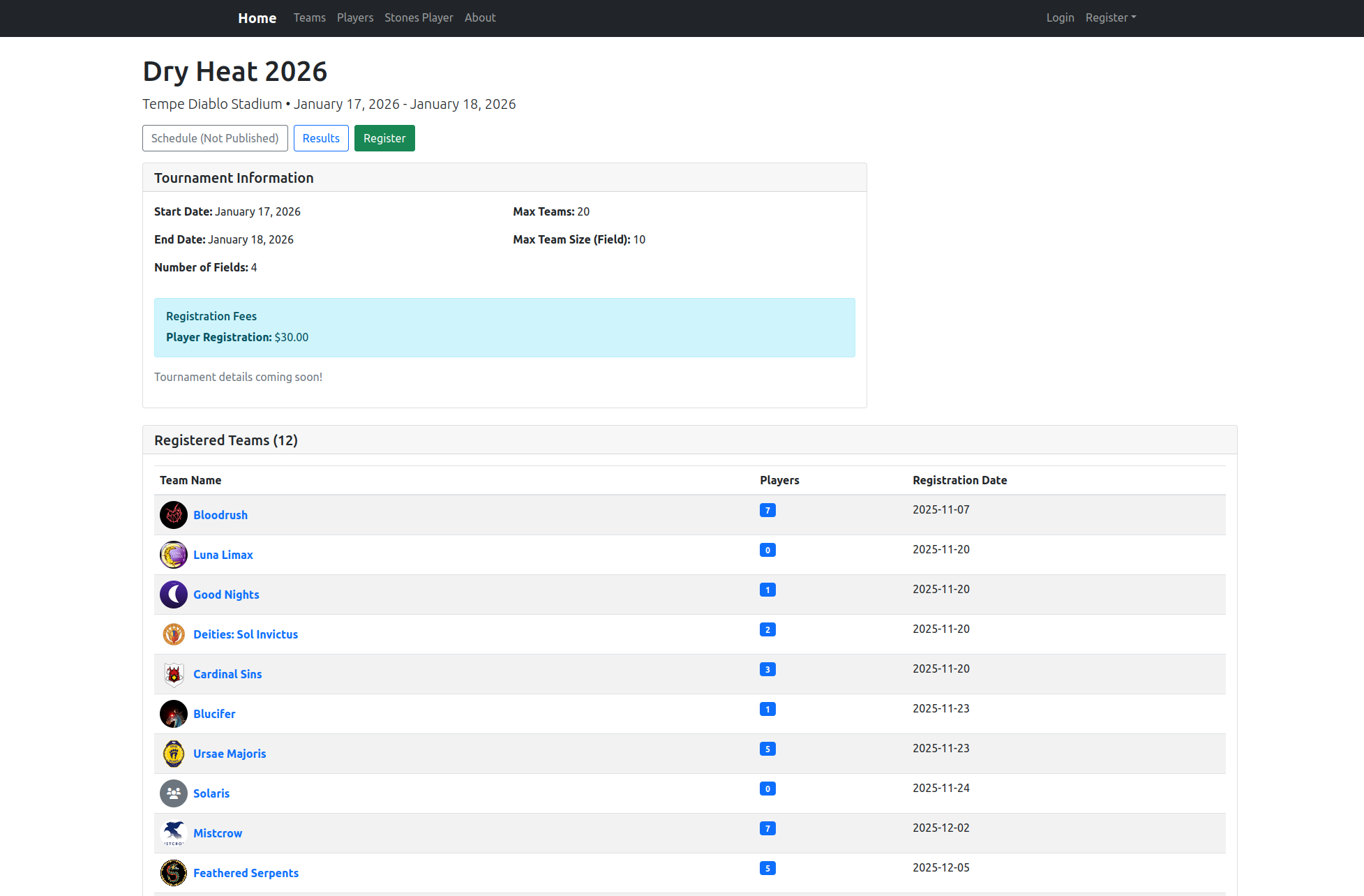
arctos
Arctos: Reid's Comprehensive Tournament Organization System aims to be the orange alliance or athletic.net for US Jugger. It manages tournament registration, score keeping, results, footage, injuries, penalties, and more.
yet another pompfen store
my small-scale hardware products business selling high-quality, open-source, modular pompfen (jugger spars). prices and configurator here.
cartpole v2.0
on-line nonlinear mpc for stabilization of a double inverted pendulum on a cart. Builds on my original cartpole project.
sawyer stacking
block stacking using the Rethink Robotics Sawyer arms, for ME C106A. software stack includes ros, moveit, and alvar.
zipe loads (paper, github)
my research on using power-electronic loads as a replacement for constant-power loads to improve numerical stability of the fast-timescale simulations required for inverter-dominated power grids

PowerSystemsExperiments.jl
a Julia package for high dimensional plotting and parameter sweeps of simulations with PowerSimulationsDynamics.jl. Used to produce the beautiful interactive plots from the zipe loads paper.

cartpole
swing-up and balancing of an inverted pendulum on a cart implemented on a custom-built physical test setup. double pendulum coming soon.
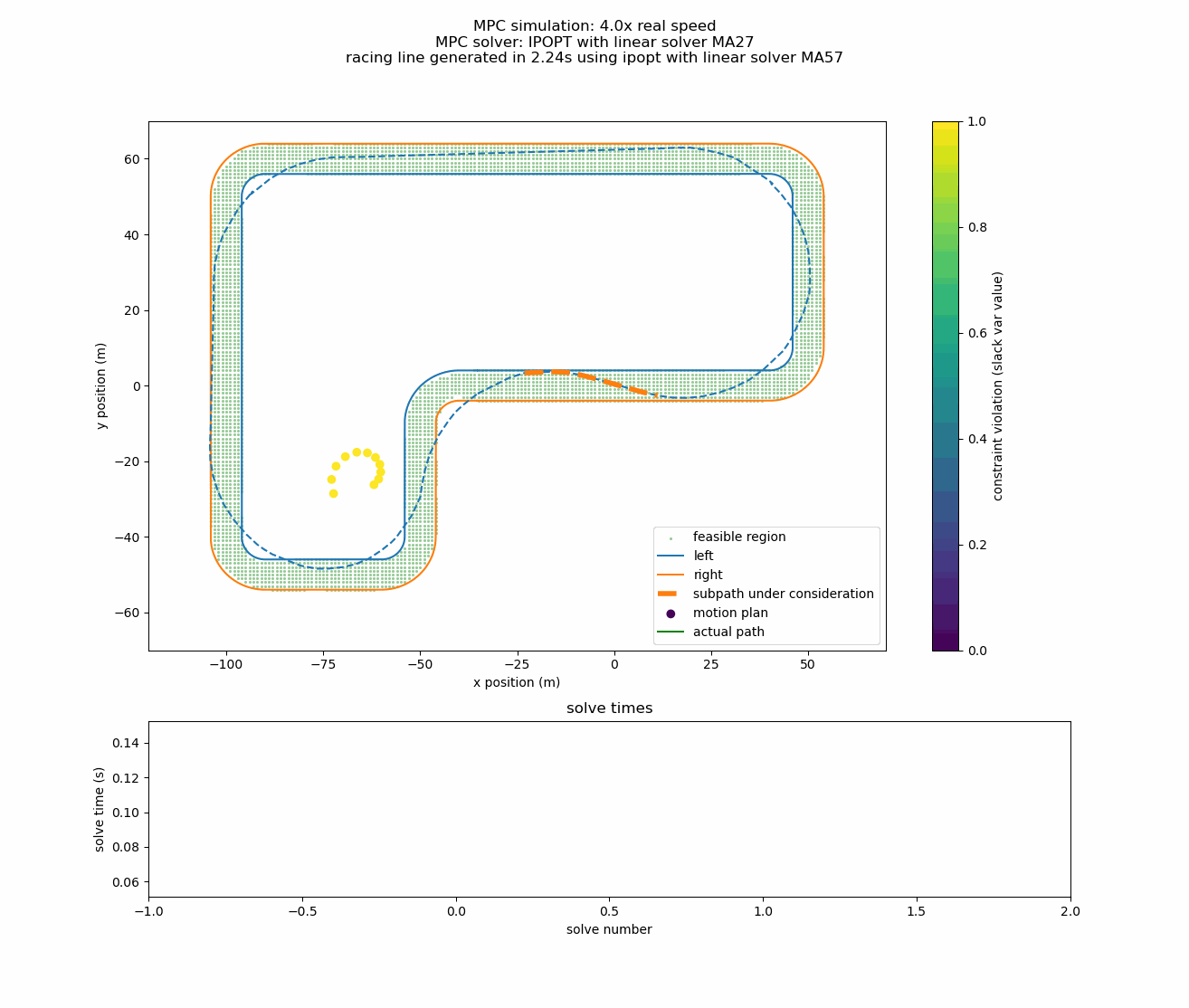
racecar mpc
mpc implemented with casadi for following a path through state space. Impossible racing line in demo demonstrates track constraints.
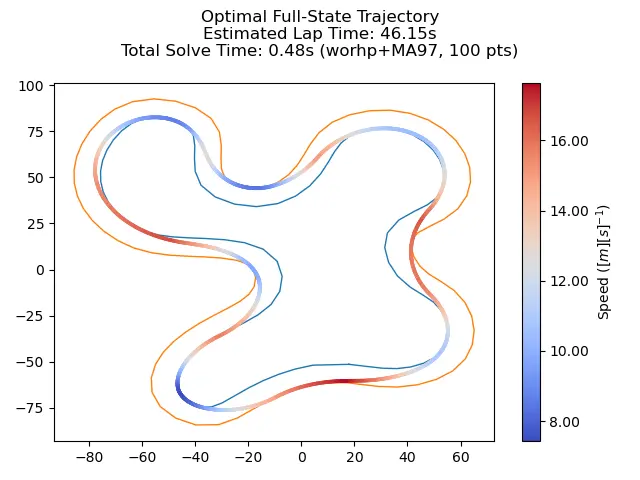
racing line optimization
global trajectory optimization given a track. Minimizes lap time subject to drive power, steering, and tire friction constraints.
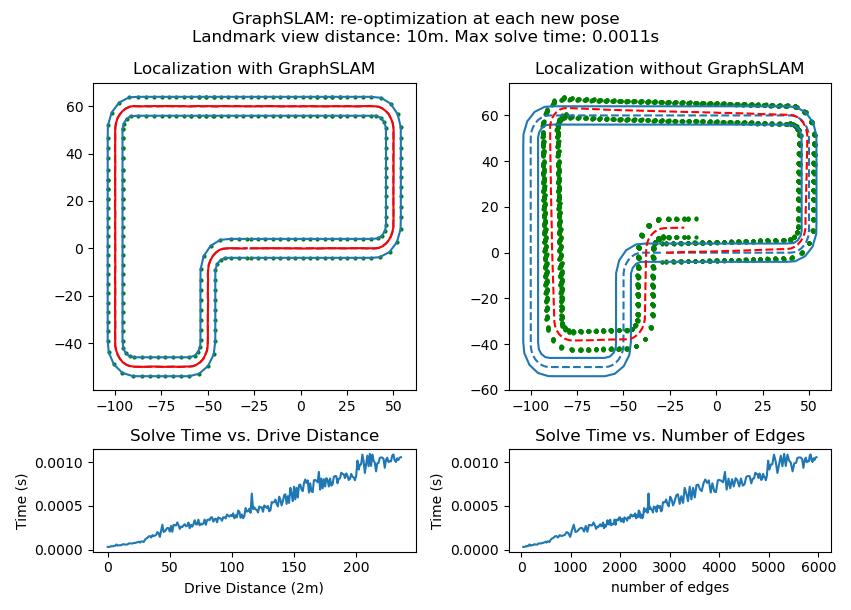
graphslam.rs
fast Rust implementation of GraphSLAM with a Python interface, demonstrating solving the loop closing problem even with non-zero-mean, non-gaussian noise.
turret
turret-mounted automatic crossbow with onboard facial recognition.

mecanum mpc
mpc implementation for mecanum-wheeled robots. dynamics model derived using lagrangian mechanics by Max Cai and Alec Petridis (teammates) adding onto work by Inigo M. Caireta. mpc outputs motor voltages.
memes
using AI to predict meme spread based on textual descriptions by predicting parameters for the SIR epidemiology model.

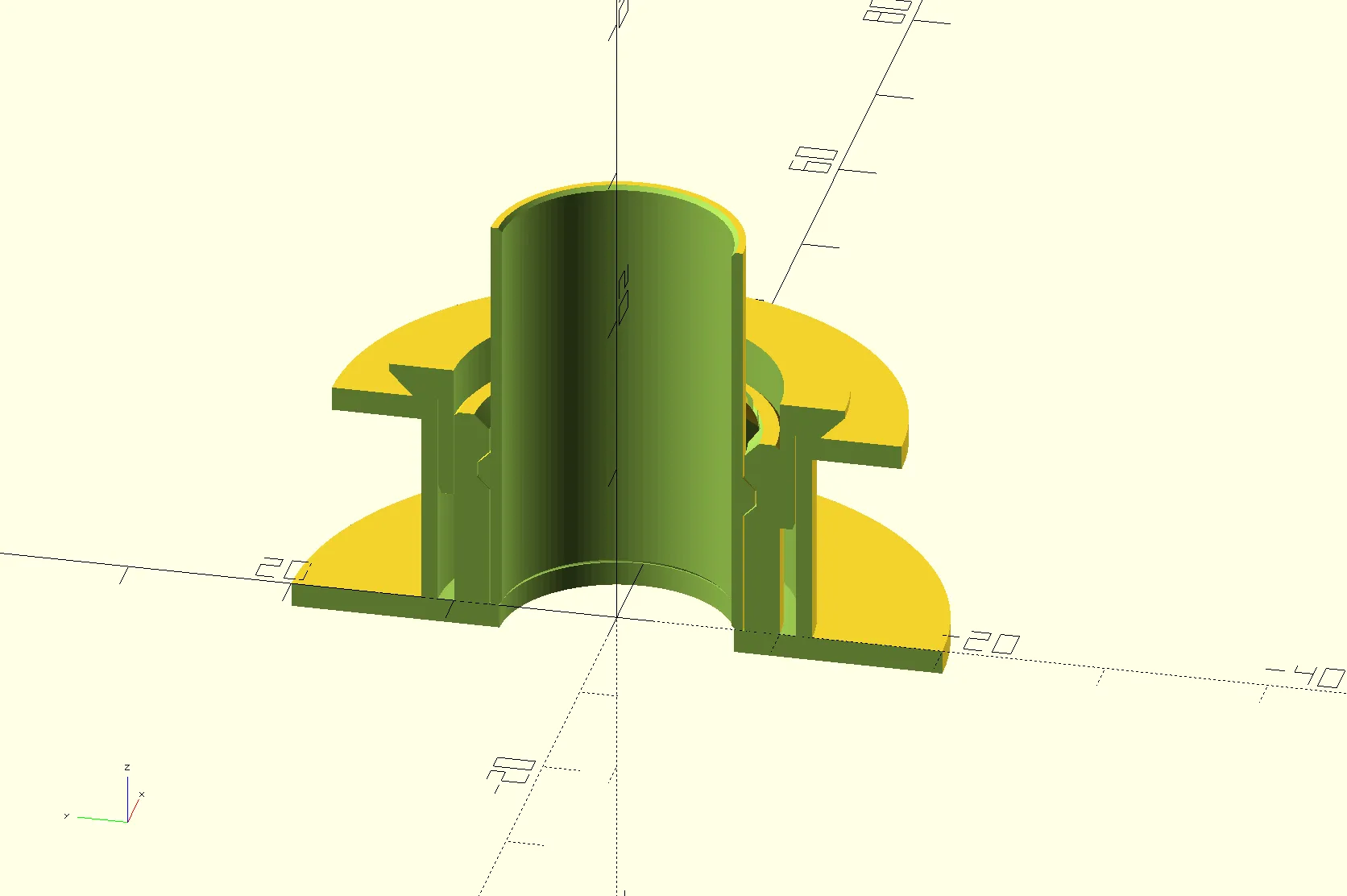
locking mecanum
a mecanum wheel that can lock its rollers to transition to standard wheels for extra traction when needed. no slip rings necessary.
robot gallery
A bunch of nice images of the robots i've worked on during my time with FIRST.

kuriosity hardware docs
A snapshot of the documentation I wrote for Kuriosity Hardware. Not maintained, but still very relevant. Exported from Notion, so some embeds are just links.

cheapo-drive
A cheap, bare-bones brushless servo driver from scratch to learn about embedded systems, field oriented control, and circuit design. Inspired by the ODrive project.






